Shift register (input)
The 74HC165 is an 8-bit parallel-load or serial-in shift register.
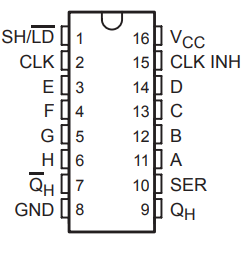
Wiring:
- Pin 8 (GND): GND
- Pin 16 (VCC): Voltage 5V
- Pin 11-14 & 3-6 (A-H): Input 1-8
- Pin 1 (SH/LD): shift/load pin
- Pin 2 (CLK): Clock pin
- Pin 9 (QH): Data output pin
- Pin 15 (CLK INH): Clock-inhibit pin (or GND)
Clocking is accomplished by a low-to-high transition of the clock (CLK) input while SH/LD is held high and CLK INH is held low. CLK INH can be wired to GND to save a pin on the microcontroller. Unused inputs pins should be grounded as well.
Multiple 74HC165 ICs can be daisy chained by wiring the serial-out pin 9 (QH) to pin 10 (SER) of the succeeding IC allowing us to tie multiple 74165 ICs together that can be controlled using only 3 pins.
#define SO 2 // SER/DATA (Pin 9) of 74HC165 is connected to D2 of Arduino
#define SH_LD 3 // SH/LD (Pin 1) of 74HC165 is connected to D3 of Arduino
#define CLK 4 // CLK (Pin 2) of 74HC165 is connected to D4 of Arduino
// variables will change:
int i = 0; // variable for reading 8-bit data
int PinState = 0; //read the state of the SO pin
int Parallel_data = 0;//To store parallel data
void setup() {
// initialize SH_LD & CLK pin as output:
pinMode(SH_LD, OUTPUT);
pinMode(CLK, OUTPUT);
// initialize sER-Serial output pin as input:
pinMode(SO, INPUT);
}
void loop() {
digitalWrite(CLK, LOW);
/*Parallel data that will be entered through D0 - D7 Pins of 74165 **/
digitalWrite(SH_LD, LOW);
delay(5);
/******************* INHIBIT SECTION START HERE *****************/
digitalWrite(SH_LD, HIGH);
/******************* INHIBIT SECTION ENDS HERE ******************/
/************** SERIAL SHIFT SECTION START HERE **********/
//Read 8-bit data from 74HC165
Serial.print("Parallel Data:");
for(i=0;i<8;i++)
{
PinState = digitalRead(SO);// read the state of the SO:
digitalWrite(CLK, LOW);
delay(1);
digitalWrite(CLK, HIGH);
delay(1);
Serial.print(PinState); //Send out one by one parallel data to serial monitor
Parallel_data = (Parallel_data<<1)|PinState; //Store the value in Parallel_data
}
Serial.println();
delay(1000);
}