ODEs with the targeted package using external pointers
Mathematical and statistical software often relies on sequential computations.
Examples are likelihood evaluations where it typically is necessary to loop over
the rows of the data, or solving ordinary differential equations where
numerical approximations are based on looping over the evolving time. When using
high-level languages such as R or python such calculations can be very slow
unless the algorithms can be vectorized. Fortunately, it is straight-forward to
make the implementations in C/C++ and subsequently make an interface to R and
python (
Rcpp and
pybind11).
<!–more–>
For generic implementations it may be necessary to allow for user-defined
functions defined in the high-level language. In R this is straightforward
and nicely implemented with the Rcpp::Function type:
// [[Rcpp::export]]
arma::vec f1(arma::vec x, Rcpp::Function f) {
for (unsigned i=0; i < x.n_elem; i++) {
x(i) = f(x(i));
}
return x;
}
In R we may then call the function as
f1(1:2, log)
[,1]
[1,] 0.0000000
[2,] 0.6931472
When the R function only needs to be called a few times this may be a reasonable
solution. Unfortunately, in long loops this becomes a bottleneck (in fact, it
can be much less efficient than the pure R loop) and destroys the whole purpose
of moving the code to C++. Instead, the generic C++ code may be based on
receiving an external pointer:
using fun_t = std::function<double(double)>;
using funptr_t = Rcpp::XPtr<fun_t>;
// [[Rcpp::export]]
arma::vec f2(const arma::vec &x, funptr_t f) {
arma::vec res(x.n_elem);
for (unsigned i=0; i < x.n_elem; i++) {
res(i) = (*f)(x(i));
}
return res;
}
We can then use a user-defined C++ function for example defined as inline code using the function
Rcpp::sourceCpp
Rcpp::sourceCpp(code='
#include <Rcpp.h>
using fun_t = std::function<double(double)>;
using funptr_t = Rcpp::XPtr<fun_t>;
double mylog(double x) {
return std::log(x);
}
// [[Rcpp::export]]
funptr_t make_funptr() {
return funptr_t(new fun_t(mylog));
}
')
In R we can then call the original C++-function (wrapped as f2) with the external pointer defined with the new exported function make_funptr:
f2(c(1,2), make_funptr())
[,1]
[1,] 0.0000000
[2,] 0.6931472
The RcppXptrUtils simplifies this even further allowing inline definitions like
ptr <- RcppXPtrUtils::cppXPtr('double foo(double x) { return std::log(x); }')
To benchmark the solutions we can also look at a pure C++ implementation:
// [[Rcpp::export]]
arma::vec f0(const arma::vec &x) {
arma::vec res(x.n_elem);
for (unsigned i=0; i < x.n_elem; i++) {
res(i) = std::log(x(i));
}
return res;
}
res <- microbenchmark::microbenchmark(f0(runif(1e4)),
f1(runif(1e4), log),
f2(runif(1e4), make_funptr()))
res
Unit: microseconds
expr min lq mean median
f0(runif(10000)) 305.291 314.2550 334.9816 322.9965
f1(runif(10000), log) 110729.709 113773.4825 117273.0796 115268.5975
f2(runif(10000), make_funptr()) 580.814 598.5765 625.8117 609.6140
uq max neval cld
353.6605 505.708 100 a
117718.3525 230688.562 100 b
626.7095 816.555 100 a
From the benchmark we see a massive improvement with the external pointer
method, f2. There is still some overhead compared to the direct C++
implementation, f0, however in most practical situations this will be of a
negligible order (in this example the vectorized R version, log(runif(1e4)), is
in fact even faster avoiding the overhead of copying results from memory between
R and C++).
ODE example
As an example consider the Lorenz Equations \[\frac{dx_{t}}{dt} = \sigma(y_{t}-x_{t})\] \[\frac{dy_{t}}{dt} = x_{t}(\rho-z_{t})-y_{t}\] \[\frac{dz_{t}}{dt} = x_{t}y_{t}-\beta z_{t}\]
There are various excellent (O)DE solvers (R:
deSolve, Julia:
DifferentialEquations.jl).
Here I will illustrate the above techniques using the targeted R-package based on
the target C++ library.
The ODE is specified using the specify_ode function
args(targeted::specify_ode)
function (code, fname = NULL, pname = c("dy", "x", "y", "p"))
The differential equations are here specified as a string containing the C++ code defining the
differential equation via the code argument.
The variable names are defined through the pname argument which defaults to
- dy
- Vector with derivatives, i.e. the rhs of the ODE, \(y’(t)\) (the result).
- x
- Vector, with the first element being the time, and the following elements additional exogenous input variables, \(x(t) = \{t,x_{1}(t),\ldots,x_{k}(t)\}\)
- y
- Dependent variable, \(y(t) = \{y_{1}(t),\ldots,y_{l}(t)\}\)
- p
- Parameter vector \[y’(t) = f_{p}(x(t), y(t))\]
All variables are treated as
armadillo vectors/matrices, arma::mat.
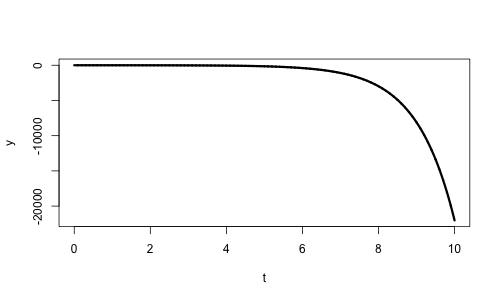
As an example, we can specify the simple differential equation \[y’(t) = y(t)-1\]
dy <- targeted::specify_ode("dy = y - 1;")
This compiles the function and stores the pointer in the variable dy.
To solve the ODE we must then use the function solve_ode
args(targeted::solve_ode)
function (ode_ptr, input, init, par = 0)
The first argument is the external pointer, the second argument input is the
input matrix (\(x(t)\) above), and the init argument is the vector of initial
boundary conditions \(y(0)\). The argument par is the vector of parameters
defining the ODE (\(p\)).
In this example the input variable does not depend on any exogenous variables so we only need to supply the time points, and the defined ODE does not depend on any parameters. To approximate the solution with initial condition \(y(0)=0\), we therefore run the following code
t <- seq(0, 10, length.out=1e4)
y <- targeted::solve_ode(dy, t, init=0)
plot(t, y, type='l', lwd=3)
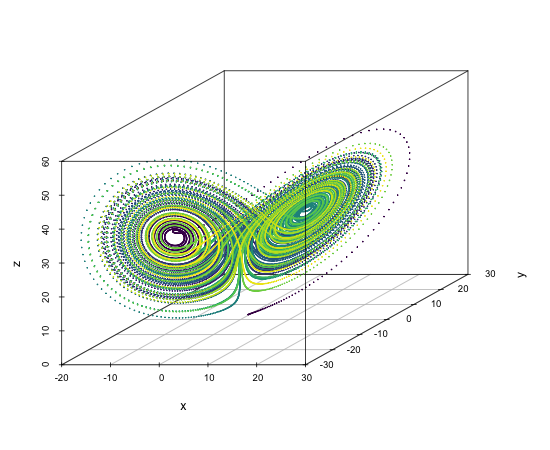
Turning back to the Lorenz Equations we may define them as
library(targeted)
ode <- 'dy(0) = p(0)*(y(1)-y(0));
dy(1) = y(0)*(p(1)-y(2));
dy(2) = y(0)*y(1)-p(2)*y(2);'
f <- specify_ode(ode)
With the choice of parameters given by \(\sigma=10, \rho=28, \beta=8/3\) and initial conditions \((x_0,y_0,z_0)=(1,1,1)\), we can calculate the solution
tt <- seq(0, 100, length.out=2e4)
y <- solve_ode(f, input=tt, init=c(1, 1, 1), par=c(10, 28, 8/3))
head(y)
[,1] [,2] [,3]
[1,] 1.000000 1.000000 1.0000000
[2,] 1.003322 1.135177 0.9920639
[3,] 1.013094 1.271279 0.9849468
[4,] 1.029068 1.409156 0.9786954
[5,] 1.051048 1.549630 0.9733721
[6,] 1.078888 1.693496 0.9690541
colnames(y) <- c("x","y","z")
scatterplot3d::scatterplot3d(y, cex.symbols=0.1, type='b',
color=viridisLite::viridis(nrow(y)))
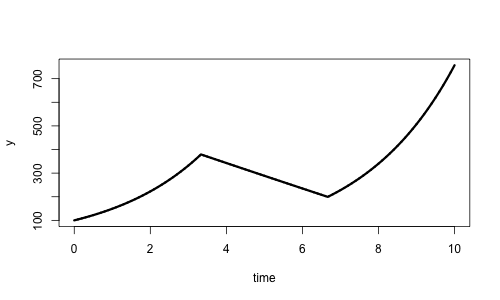
To illustrate the use of exogenous inputs, consider the following simulated data
n <- 1e4
tt <- seq(0, 10, length.out=n) # Time
xx <- rep(0, n); xx[(n/3):(2*n/3)] <- 1 # Exogenous input, x(t)
input <- cbind(tt, xx)
and the following ODE
\[y’(t) = \beta_{0} + \beta_{1}y(t) + \beta_{2}y(t)x(t) + \beta_{3}x(t)\cdot t\]
mod <- 'double t = x(0);
dy = p(0) + p(1)*y + p(2)*x(1)*y + p(3)*x(1)*t;'
dy <- specify_ode(mod)
With \(y(0)=100\) and \(\beta_0=0, \beta_{1}=0.4, \beta_{2}=-0.5, \beta_{3}=-5\) we obtain the following solution
yy <- solve_ode(dy, input=input, init=100, c(0, .4, -.5, -5))
plot(tt, yy, type='l', lwd=3, xlab='time', ylab='y')